





לגבי למה מצב דלדולמכשירי MOSFETאינם בשימוש, לא מומלץ לרדת לתחתיתו.
עבור שני MOSFETs במצבי שיפור אלה, נעשה שימוש נפוץ יותר ב-NMOS. הסיבה היא שההתנגדות נגד קטנה וקלה לייצור. לכן, נעשה שימוש בדרך כלל ב-NMOS בהחלפת יישומי אספקת חשמל והנעת מנוע. בהקדמה הבאה, נעשה שימוש בעיקר ב-NMOS.
יש קיבול טפילי בין שלושת הפינים של ה-MOSFET. זה לא מה שאנחנו צריכים, אלא נגרם על ידי מגבלות תהליכי ייצור. קיומו של קיבול טפילי הופך אותו לבעייתי יותר בעת תכנון או בחירת מעגל כונן, אך אין דרך להימנע מכך. אנו נציג זאת בפירוט בהמשך.
יש דיודה טפילית בין הניקוז למקור. זה נקרא דיודת הגוף. דיודה זו חשובה מאוד בעת הנעת עומסים אינדוקטיביים (כגון מנועים). אגב, דיודת הגוף קיימת רק ב-MOSFET בודד ולרוב לא נמצאת בתוך שבב מעגל משולב.
2. מאפייני הולכה של MOSFET
הולכה משמעה לפעול כמתג, דבר המקביל לסגירת המתג.
המאפיין של NMOS הוא שהוא יופעל כאשר Vgs גדול מערך מסוים. הוא מתאים לשימוש כאשר המקור מוארק (כונן נמוך), כל עוד מתח השער מגיע ל-4V או 10V.
המאפיינים של PMOS הם שהוא יופעל כאשר Vgs נמוך מערך מסוים, מה שמתאים למצבים בהם המקור מחובר ל-VCC (כונן גבוה). עם זאת, למרותPMOSיכול לשמש בקלות כדרייבר מתקדם, NMOS משמש בדרך כלל בדרייברים מתקדמים בשל התנגדות גדולה, מחיר גבוה ומעט סוגי החלפה.
3. אובדן צינור מתג MOS
בין אם זה NMOS או PMOS, יש התנגדות הפעלה לאחר הפעלתו, כך שהזרם יצרוך אנרגיה בהתנגדות זו. חלק זה של האנרגיה הנצרכת נקרא אובדן הולכה. בחירה ב-MOSFET עם התנגדות הפעלה קטנה תפחית את הפסדי ההולכה. התנגדות ההפעלה של MOSFET בהספק נמוך של היום היא בדרך כלל בסביבות עשרות מיליאוהם, ויש גם כמה מיליאוהם.
כאשר ה-MOSFET מופעל ומכבה, אסור להשלים אותו באופן מיידי. למתח על פני MOS יש תהליך יורד, ולזרם הזורם יש תהליך הולך וגדל. במהלך תקופה זו, השל MOSFETהפסד הוא תוצר של מתח וזרם, אשר נקרא אובדן מיתוג. בדרך כלל הפסדי המיתוג גדולים בהרבה מהפסדי ההולכה, וככל שתדירות המיתוג מהר יותר, כך ההפסדים גדולים יותר.
התוצר של מתח וזרם ברגע ההולכה הוא גדול מאוד, מה שגורם להפסדים גדולים. קיצור זמן המיתוג יכול להפחית את האובדן במהלך כל הולכה; הפחתת תדירות המיתוג יכולה להפחית את מספר המתגים ליחידת זמן. שתי השיטות יכולות להפחית את הפסדי המיתוג.
צורת הגל כאשר ה-MOSFET מופעל. ניתן לראות שמכפלת המתח והזרם ברגע ההולכה גדולה מאוד, וגם ההפסד הנגרם גדול מאוד. צמצום זמן המיתוג יכול להפחית את האובדן במהלך כל הולכה; הפחתת תדירות המיתוג יכולה להפחית את מספר המתגים ליחידת זמן. שתי השיטות יכולות להפחית את הפסדי המיתוג.
4. דרייבר MOSFET
בהשוואה לטרנזיסטורים דו-קוטביים, מקובל לחשוב שלא נדרש זרם כדי להפעיל MOSFET, כל עוד מתח ה-GS גבוה מערך מסוים. זה קל לעשות, אבל אנחנו גם צריכים מהירות.
ניתן לראות במבנה של ה-MOSFET שיש קיבול טפילי בין GS ל-GD, וההנעה של ה-MOSFET היא למעשה הטעינה והפריקה של הקבל. טעינת הקבל דורשת זרם, מכיוון שניתן לראות את הקבל כקצר חשמלי ברגע הטעינה, כך שהזרם המיידי יהיה גדול יחסית. הדבר הראשון שיש לשים לב אליו בעת בחירת/עיצוב דרייבר של MOSFET הוא כמות זרם הקצר המיידי שהוא יכול לספק.
הדבר השני שיש לציין הוא ש-NMOS, המשמש בדרך כלל לנהיגה מתקדמת, צריך שמתח השער יהיה גדול ממתח המקור כאשר הוא מופעל. כאשר ה-MOSFET המונע על צד גבוה מופעל, מתח המקור זהה למתח הניקוז (VCC), כך שמתח השער גדול ב-4V או 10V מ-VCC בשלב זה. אם אתה רוצה לקבל מתח גדול יותר מ-VCC באותה מערכת, אתה צריך מעגל חיזוק מיוחד. נהגי מנוע רבים כוללים משאבות טעינה משולבות. יש לציין שיש לבחור קבל חיצוני מתאים כדי להשיג זרם קצר חשמלי מספיק כדי להניע את ה-MOSFET.
ה-4V או 10V שהוזכרו לעיל הם מתח ההדלקה של MOSFETs הנפוצים, וכמובן שצריך לאפשר מרווח מסוים במהלך התכנון. וככל שהמתח גבוה יותר, מהירות ההולכה מהירה יותר והתנגדות ההולכה קטנה יותר. כעת ישנם MOSFETs עם מתחי הולכה קטנים יותר המשמשים בתחומים שונים, אך במערכות אלקטרוניות לרכב 12V, בדרך כלל הולכה של 4V מספיקה.
למעגל מנהלי ההתקן של MOSFET וההפסדים שלו, עיין ב-AN799 של Microchip התאמת מנהלי התקנים של MOSFET ל-MOSFET. זה מאוד מפורט, אז אני לא אכתוב יותר.
התוצר של מתח וזרם ברגע ההולכה הוא גדול מאוד, מה שגורם להפסדים גדולים. צמצום זמן המיתוג יכול להפחית את האובדן במהלך כל הולכה; הפחתת תדירות המיתוג יכולה להפחית את מספר המתגים ליחידת זמן. שתי השיטות יכולות להפחית את הפסדי המיתוג.
MOSFET הוא סוג של FET (השני הוא JFET). ניתן להפוך אותו למצב שיפור או מצב דלדול, ערוץ P או ערוץ N, בסך הכל 4 סוגים. עם זאת, נעשה שימוש בפועל ב-MOSFET N-channel במצב שיפור. ו-MOSFET מסוג P-channel, כך ש-NMOS או PMOS מתייחסים בדרך כלל לשני הסוגים הללו.
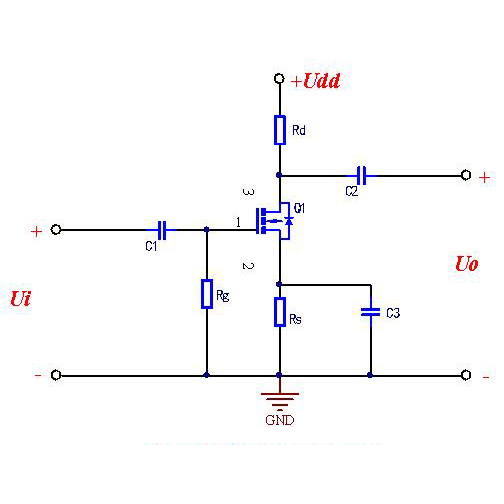
5. מעגל יישום MOSFET?
המאפיין המשמעותי ביותר של MOSFET הוא מאפייני המיתוג הטובים שלו, ולכן הוא נמצא בשימוש נרחב במעגלים הדורשים מתגים אלקטרוניים, כגון מיתוג ספקי כוח והנעי מנוע, כמו גם עמעום תאורה.
למנהלי התקן MOSFET של היום יש מספר דרישות מיוחדות:
1. יישום מתח נמוך
בעת שימוש באספקת חשמל של 5V, אם משתמשים במבנה עמוד טוטם מסורתי בשלב זה, מכיוון שלטרנזיסטור יש מפל מתח של כ-0.7V, המתח הסופי המופעל על השער הוא רק 4.3V. בשלב זה, אנו בוחרים את כוח השער הנומינלי
קיים סיכון מסוים בעת שימוש ב-MOSFET 4.5V. אותה בעיה מתרחשת גם בעת שימוש ב-3V או ספקי כוח אחרים במתח נמוך.
2. יישום מתח רחב
מתח הכניסה אינו ערך קבוע, הוא ישתנה עם הזמן או גורמים אחרים. שינוי זה גורם למתח ההנעה שמספק מעגל PWM ל-MOSFET להיות לא יציב.
על מנת להפוך את MOSFETs בטוחים תחת מתחי שער גבוהים, MOSFETs רבים כוללים ווסתי מתח מובנים כדי להגביל בכוח את משרעת מתח השער. במקרה זה, כאשר מתח ההנעה המסופק חורג מהמתח של צינור ווסת המתח, הדבר יגרום לצריכת חשמל סטטית גדולה.
יחד עם זאת, אם אתה פשוט משתמש בעיקרון של חלוקת מתח הנגד כדי להפחית את מתח השער, ה-MOSFET יעבוד היטב כאשר מתח הכניסה גבוה יחסית, אך כאשר מתח הכניסה מופחת, מתח השער לא יהיה מספיק, מה שגורם הולכה לא מלאה, ובכך מגדילה את צריכת החשמל.
3. יישום מתח כפול
בחלק ממעגלי הבקרה, החלק הלוגי משתמש במתח דיגיטלי טיפוסי של 5V או 3.3V, בעוד שחלק הכוח משתמש במתח של 12V או אפילו יותר. שני המתחים מחוברים להארקה משותפת.
זה מעלה דרישה להשתמש במעגל כך שצד המתח הנמוך יוכל לשלוט ביעילות על ה-MOSFET בצד המתח הגבוה. במקביל, ה-MOSFET בצד המתח הגבוה יתמודד גם עם הבעיות שהוזכרו ב-1 ו-2.
בשלושת המקרים הללו, מבנה עמוד הטוטם אינו יכול לעמוד בדרישות התפוקה, ונראה כי IC רבים של מנהלי ההתקן של MOSFET אינם כוללים מבנים מגבילי מתח שער.
אז תכננתי מעגל כללי יחסית שיענה על שלושת הצרכים הללו.
מעגל דרייבר עבור NMOS
כאן אעשה רק ניתוח פשוט של מעגל מנהל ההתקן של NMOS:
Vl ו-Vh הם ספקי הכוח הנמוכים והמתקדמים בהתאמה. שני המתחים יכולים להיות זהים, אך Vl לא יעלה על Vh.
Q1 ו-Q2 יוצרים עמוד טוטם הפוך כדי להשיג בידוד תוך הבטחה ששני צינורות הנהג Q3 ו-Q4 לא נדלקים בו זמנית.
R2 ו-R3 מספקים את הפניה למתח PWM. על ידי שינוי התייחסות זו, ניתן להפעיל את המעגל במצב שבו צורת הגל של אות PWM תלולה יחסית.
Q3 ו-Q4 משמשים לספק זרם כונן. כשהם מופעלים, ל-Q3 ו-Q4 יש רק ירידת מתח מינימלית של Vce ביחס ל-Vh ול-GND. נפילת מתח זו היא בדרך כלל רק כ-0.3V, וזה הרבה יותר נמוך מה-Vce של 0.7V.
R5 ו-R6 הם נגדי משוב, המשמשים לדגימת מתח השער. המתח הנדגם יוצר משוב שלילי חזק לבסיסים של Q1 ו-Q2 עד Q5, ובכך מגביל את מתח השער לערך מוגבל. ניתן לכוונן ערך זה באמצעות R5 ו-R6.
לבסוף, R1 מספק את מגבלת זרם הבסיס עבור Q3 ו-Q4, ו-R4 מספק את מגבלת זרם השער עבור MOSFET, שהיא הגבול של הקרח של Q3 ו-Q4. במידת הצורך, ניתן לחבר קבל תאוצה במקביל ל-R4.
מעגל זה מספק את התכונות הבאות:
1. השתמש במתח צד נמוך וב-PWM כדי להניע את ה-MOSFET הצד הגבוה.
2. השתמש באות PWM עם משרעת קטנה כדי להניע MOSFET עם דרישות מתח גבוהות בשער.
3. גבול שיא של מתח השער
4. מגבלות זרם קלט ופלט
5. באמצעות נגדים מתאימים, ניתן להשיג צריכת חשמל נמוכה מאוד.
6. אות PWM הפוך. NMOS אינו זקוק לתכונה זו וניתן לפתור אותה על ידי הצבת מהפך מלפנים.
בעת תכנון מכשירים ניידים ומוצרים אלחוטיים, שיפור ביצועי המוצר והארכת חיי הסוללה הם שתי בעיות שהמעצבים צריכים להתמודד איתם. לממירי DC-DC יש את היתרונות של יעילות גבוהה, זרם פלט גדול וזרם שקט נמוך, מה שהופך אותם למתאימים מאוד להפעלת מכשירים ניידים. כיום, המגמות העיקריות בפיתוח טכנולוגיית תכנון ממירי DC-DC הן: (1) טכנולוגיית תדר גבוה: ככל שתדר המיתוג עולה, גודלו של ממיר המיתוג מצטמצם גם הוא, צפיפות ההספק גדלה מאוד. והתגובה הדינמית משתפרת. . תדר המיתוג של ממירי DC-DC בעלי הספק נמוך יעלה לרמת מגה-הרץ. (2) טכנולוגיית מתח פלט נמוך: עם התפתחות מתמשכת של טכנולוגיית ייצור מוליכים למחצה, מתח ההפעלה של מיקרו-מעבדים ומכשירים אלקטרוניים ניידים הולך ויורד, מה שמצריך ממירי DC-DC עתידיים לספק מתח פלט נמוך כדי להתאים למיקרו-מעבדים. דרישות למעבדים ולמכשירים אלקטרוניים ניידים.
הפיתוח של טכנולוגיות אלה העלה דרישות גבוהות יותר לתכנון של מעגלי שבבי כוח. קודם כל, ככל שתדירות המיתוג ממשיכה לעלות, מונחות דרישות גבוהות לביצועים של רכיבי מיתוג. במקביל, יש לספק מעגלי הנעה מתאימים של רכיבי מיתוג כדי להבטיח שרכיבי המיתוג עובדים כרגיל בתדרי מיתוג עד מגה-הרץ. שנית, עבור מכשירים אלקטרוניים ניידים המופעלים על ידי סוללה, מתח העבודה של המעגל נמוך (לדוגמה, מתח העבודה הוא 2.5~3.6V), לפיכך, מתח העבודה של שבב החשמל נמוך.
ל-MOSFET יש התנגדות הפעלה נמוכה מאוד וצורכת אנרגיה נמוכה. MOSFET משמש לעתים קרובות כמתג הפעלה בשבבי DC-DC פופולריים כיום עם יעילות גבוהה. עם זאת, בשל הקיבול הטפילי הגדול של MOSFET, קיבול השער של צינורות מיתוג NMOS הוא בדרך כלל גבוה כמו עשרות פיקופראד. זה מציב דרישות גבוהות יותר לתכנון של מעגל כונן צינור מיתוג ממיר DC-DC בתדר הפעלה גבוה.
בתכנוני ULSI במתח נמוך, ישנם מגוון מעגלים לוגיים CMOS ו-BiCMOS המשתמשים במבני דחיפה של bootstrap ומעגלי הנעה כעומסים קיבוליים גדולים. מעגלים אלו יכולים לפעול כרגיל עם מתח אספקת חשמל נמוך מ-1V, ויכולים לפעול בתדר של עשרות מגה-הרץ או אפילו מאות מגה-הרץ עם קיבולת עומס של 1 עד 2pF. מאמר זה משתמש במעגל דחיפה של bootstrap כדי לתכנן מעגל הנעה עם יכולת כונן קיבולת עומס גדולה, המתאים לממירי DC-DC להגביר מתח נמוך ותדר מיתוג גבוה. המעגל תוכנן על בסיס תהליך BiCMOS של Samsung AHP615 ומאומת על ידי סימולציית Hspice. כאשר מתח האספקה הוא 1.5V וקיבול העומס הוא 60pF, תדר ההפעלה יכול להגיע ליותר מ-5MHz.
מאפייני מיתוג MOSFET
1. מאפיינים סטטיים
כאלמנט מיתוג, MOSFET פועל גם בשני מצבים: כבוי או מופעל. מכיוון שה-MOSFET הוא רכיב מבוקר מתח, מצב העבודה שלו נקבע בעיקר על ידי מתח מקור השער uGS.
מאפייני העבודה הם כדלקמן:
※ uGS<מתח הפעלה UT: MOSFET פועל באזור הניתוק, זרם מקור הניקוז iDS הוא בעצם 0, מתח המוצא uDS≈UDD, וה-MOSFET במצב "כבוי".
※ uGS>מתח הפעלה UT: MOSFET פועל באזור ההולכה, זרם מקור ניקוז iDS=UDD/(RD+rDS). ביניהם, rDS היא התנגדות מקור הניקוז כאשר ה-MOSFET מופעל. מתח המוצא UDS=UDD?rDS/(RD+rDS), אם rDS<<RD, uDS≈0V, ה-MOSFET במצב "מופעל".
2. מאפיינים דינמיים
ל-MOSFET יש גם תהליך מעבר בעת מעבר בין מצבי הדלקה לכבוי, אך המאפיינים הדינמיים שלו תלויים בעיקר בזמן הדרוש לטעינה ופריקה של קיבול התועה הקשור למעגל, ובהצטברות והפריקה של המטען כאשר הצינור עצמו מופעל וכיבוי. זמן הפיזור קטן מאוד.
כאשר מתח הכניסה ui משתנה מגבוה לנמוך וה-MOSFET משתנה ממצב מופעל למצב כבוי, ספק הכוח UDD טוען את הקיבול התועה CL דרך RD, וקבוע זמן הטעינה τ1=RDCL. לכן, מתח המוצא uo צריך לעבור עיכוב מסוים לפני המעבר מרמה נמוכה לרמה גבוהה; כאשר מתח הכניסה ui משתנה מנמוך לגבוה וה-MOSFET משתנה ממצב כבוי למצב מופעל, המטען על הקיבול התועה CL עובר דרך rDS פריקה מתרחשת עם קבוע זמן פריקה τ2≈rDSCL. ניתן לראות שגם מתח המוצא Uo צריך השהייה מסוימת לפני שהוא יכול לעבור לרמה נמוכה. אבל מכיוון ש-rDS קטן בהרבה מ-RD, זמן ההמרה מניתוק להולכה קצר יותר מזמן ההמרה מהולכה לניתוק.
מכיוון שהתנגדות מקור הניקוז rDS של ה-MOSFET כשהוא מופעל גדולה בהרבה מהתנגדות הרוויה rCES של הטרנזיסטור, והתנגדות הניקוז החיצונית RD גדולה גם מהתנגדות הקולטור RC של הטרנזיסטור, זמן הטעינה והפריקה של ה-MOSFET ארוך יותר, מה שהופך את ה-MOSFET למהירות המיתוג נמוכה מזו של טרנזיסטור. עם זאת, במעגלי CMOS, מכיוון שמעגל הטעינה ומעגל הפריקה שניהם מעגלים בעלי התנגדות נמוכה, תהליכי הטעינה והפריקה מהירים יחסית, וכתוצאה מכך מהירות מיתוג גבוהה עבור מעגל CMOS.
-
חבילה גדולה מעגל מנהל התקן MOSFET
-
מה התפקיד של MOSFETs עם מתח קטן?
-

איזה מותג של MOSFET הוא טוב
-

כיצד לקבוע nMOSFETs ו-pMOSFETs
-
הדרך הנכונה לבחור MOSFETs
-

המדריך המלא למגברי MOSFET: מ-B...
-

כיצד לבחור את מעגל הנהג המתאים ביותר ...
-

האם אתה מכיר את מעגל מנהל ההתקן של MOSFET?
-

זיהוי ובדיקה בסיסית של MOSFET
-

דברו בקצרה על שיטת הייצור של ח...
-

הגנת מקור שער MOSFET
-

כיצד לקבוע שה-MOSFET בעל הספק גבוה נשרף...
-

הבנה בסיסית של MOSFET
-
שלושת התפקידים העיקריים של MOSFETs
-

כיצד למנוע כשל ב-MOSFET
-

האם ידעת על האבולוציה של MOSFET?



